We are trying to use `robot_localization` and `gmapping`. What we have done so far: we use gmapping to publish the transform between `map` -> `odom`. Then we tried to apply gps, imu and odom using ekf from robot_localization. We use navsat_transform and one ekf node to fuse all the data. This node does `odom` -> `base_link` transform. This setting does not work very well.
Here: https://roscon.ros.org/2015/presentations/robot_localization.pdf (page 4) there is a picture: 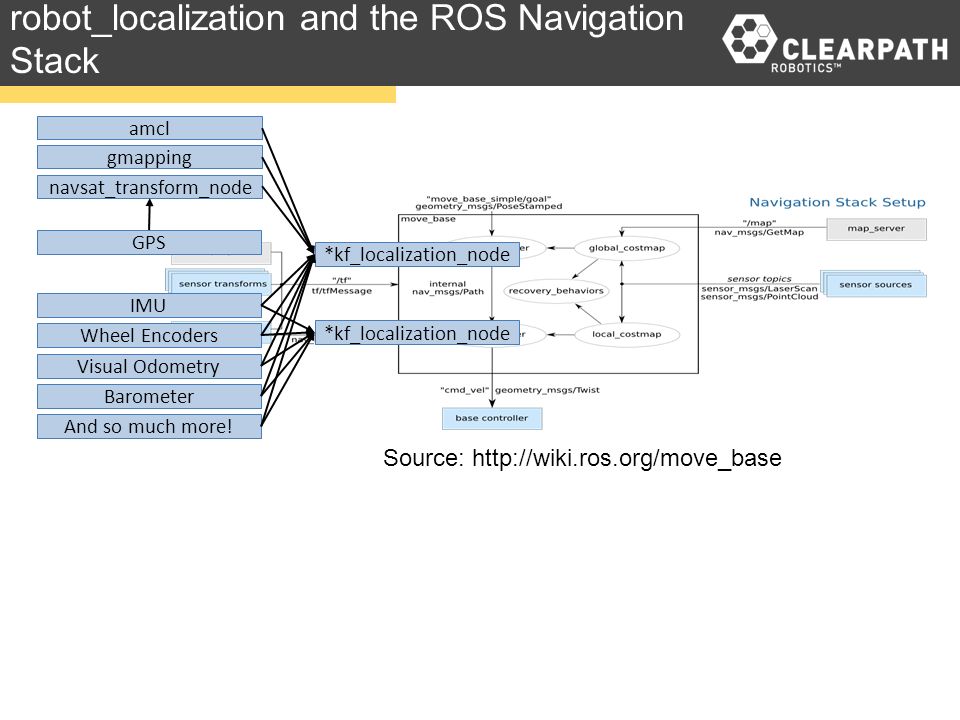
This indicates, that I should fuse gmapping and navsat_transform result in one localization node. Should this be done? How should it be done? Is there an example of it?
↧